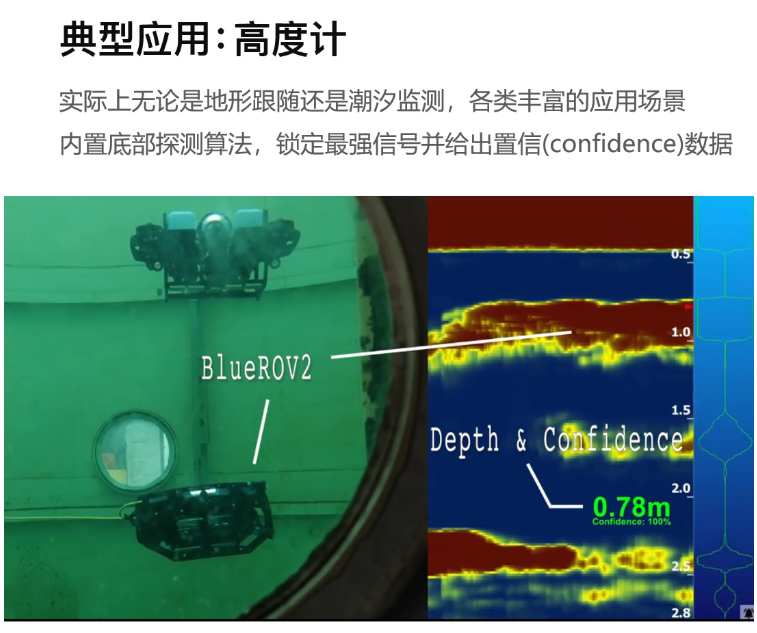
高度计(测距声呐)是一种比较常用的海洋设备,通常被用来测量ROV或其它海洋设备距离当前水底的距离,起到水下测量以及避障的作用。P30高度计(回声探测仪) 是 Blue Robotics 今年推出的一款高性价比一维声呐。它具有体积小、精度高、低成本、已集成、上位机开源等优点,可与社区 BlueROV2 无缝集成,
目前社区有售: 官方店铺链接 !


高度计(测距声呐)是一种比较常用的海洋设备,通常被用来测量ROV或其它海洋设备距离当前水底的距离,起到水下测量以及避障的作用。P30高度计(回声探测仪) 是 Blue Robotics 今年推出的一款高性价比一维声呐。它具有体积小、精度高、低成本、已集成、上位机开源等优点,可与社区 BlueROV2 无缝集成,
目前社区有售: 官方店铺链接 !

USB 4线颜色和P304线颜色一一对应
驱动安装(采用TTL转USB模块,电脑会自动安装相应驱动)
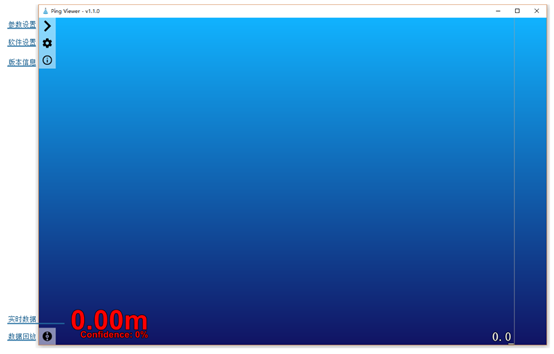
打开PingView.exe
PingView.exe会自动搜索串口,并读取数据
用来设置采集数据频率以及声学速度(需连接后才能修改)
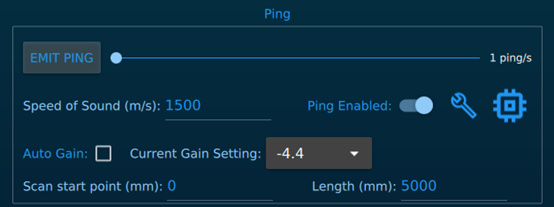
Emit Ping: 选中则取消连续传输模式,获取单帧数据
Ping Rate Slider:设置传输速率(实际使用可能稍低)
Speed of Sound:声速设置(声速被用来计算距离,海水中声速为1500 m/s,淡水中1435m/s)
Ping Enabled: 启用Ping设备的声输出。 设置为禁用时,Ping不会从传感器发出能量。 设置为启用时,即使没有数据传输,也会发出能量。
软件设置:设置背景界面以及单位换算、数据记录等功能
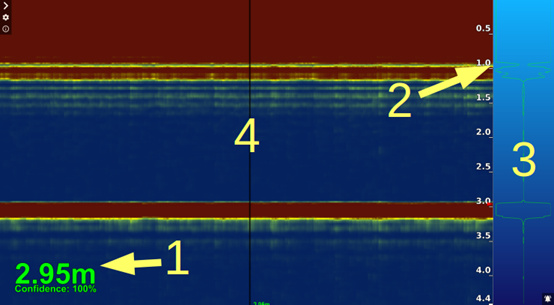
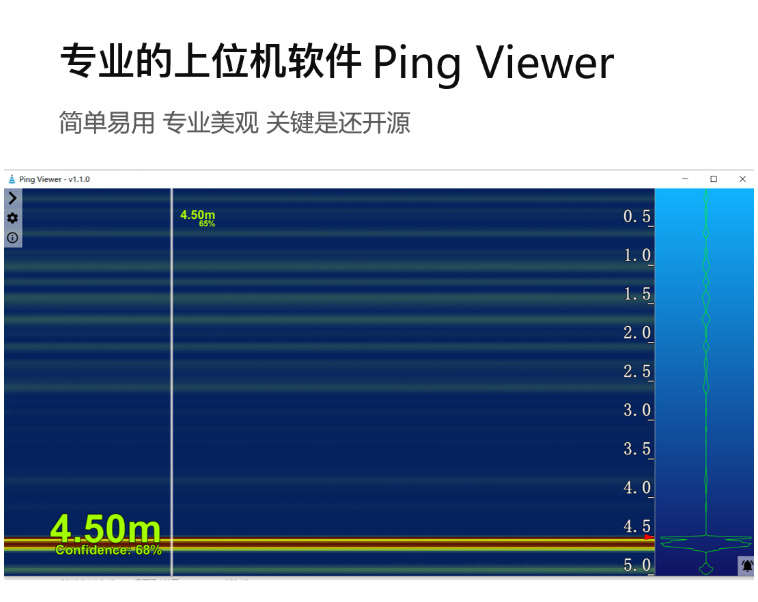
距离读数显示最近测量中到目标的距离。 这是在深度探测应用中到海底的距离。最近样本的置信度测量值显示在距离读数的距离下方。 距离读数的颜色反映当前置信度测量值,其中红色= 0%< - >绿色= 100%。 可以移动和调整距离读数的大小。
距离刻度尺在瀑布的右边缘标有粗体数字。 该轴表示与Ping设备传感器的距离。 轴沿屏幕垂直向下延伸,换能器的表面(零距离)位于窗口顶部。 物体距离传感器越深/越远,其返回将越接近窗口的底部。 距离轴刻度自动调整以显示Ping设备的当前扫描范围。距离轴上有一个橙色箭头,表示最近一次测量中与目标的距离(这与距离读数相同)。
返回图显示最近的Profile样本的返回强度与距离。 该图仅显示单个因变量(返回强度)的测量值,并且只是为了便于查看而进行镜像。 更强的回报显示为更宽的痕迹。注意您可能会在屏幕顶部观察到非常强烈的返回(零距离,基本上接触设备); 此返回来自Ping设备本身。 当Ping设备发出声脉冲时,设备在开始测量返回信号时仍然像钟一样振动或“振铃”。 Ping装置主体振动中的剩余能量被作为返回信号被拾取,直到它衰减为止。
瀑布图是占据应用程序窗口主要部分的三维图。瀑布图连续剖面样本(垂直运行的距离和指示信号强度的颜色)。横轴是时间;当旧数据向左移动时,新数据显示在瀑布的右边缘。瀑布的配色方案(渐变)可以定制。
1、length: 是设置什么长度的,默认值5000需要更改吗?
2、设备能在空气中测距离吗,声速改为340,我刚才试了数据不准,必须要在水下测试是吧?
官方说了空气中不准。水里要至少距离0.5米才有效
默认5000不用改,是量程范围,他是自适应的
请问我可以直接用单片机接收到数据吗?我的使用环境没有电脑,只有单片机。
肯定可以,串口通讯
具体的数据形式你们接收过吗?
高度计工作的一些工作参数通过软件来设定好在用单片机接收是可行的吧?
STM32的例程有吗?
暂时没有,不过有客户正在开发,如果他们同意的话,我们会发出来共享。