戳此收下:淘宝链接
概述
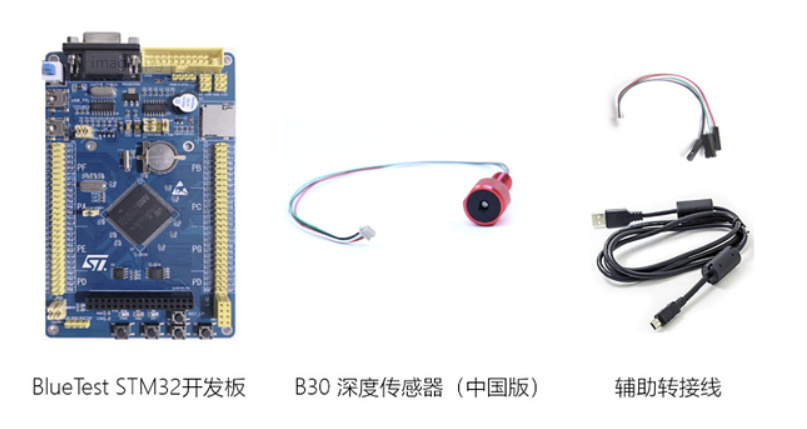
深度传感器 是所有水下机器人的必备传感器之一,本质是一个压力传感器,用来实时感知当前的水深。B30是社区主推的一款高精度深度传感器,核心是基于TE公司的MS5837-30A传感器。B30其量程高达300米,标称精度是50mBar,也就是50cm。经BlueRobots社区实际测试时,发现低量程时的精度远高于标称精度,因此使用B30的ROV/AUV等潜器在水池等浅水区域做定深运动时,依然可以获得很好的控制效果。
该教程分5个步骤来开展:
- 套件清单
- 核心器材介绍
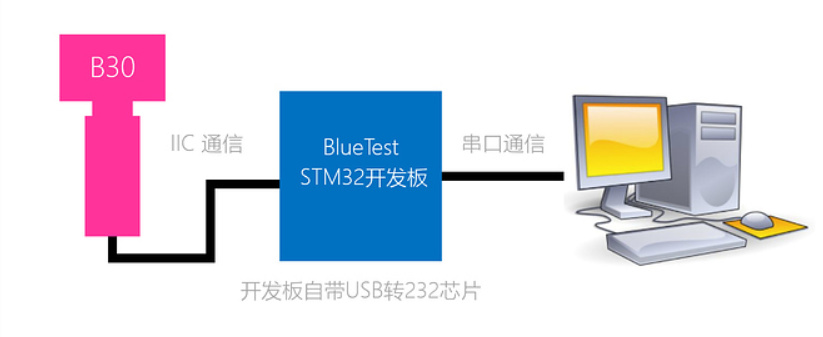
- 基本原理
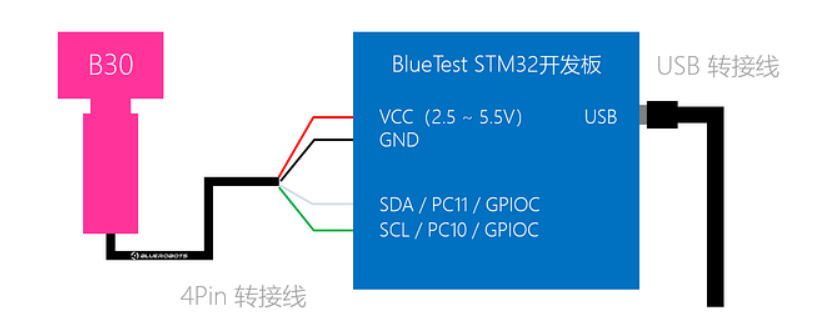
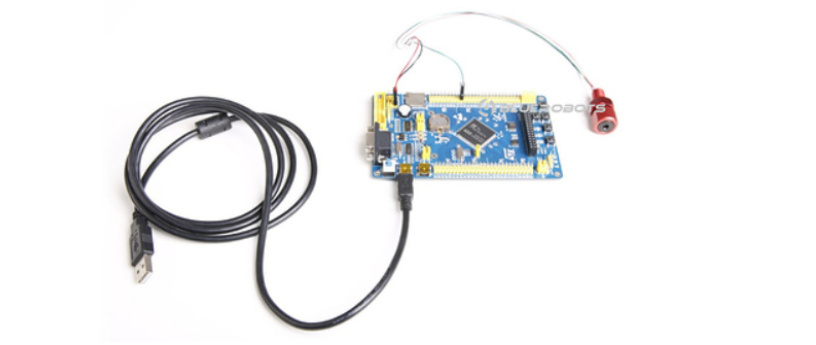
- 实验步骤
- 注意事项