
Hi,确切的讲是电机发出的声音,平时控制初始化和回中位时也无声音?
没有啊,就ROV刚接上电源会有声音,平时操作都没有声音的
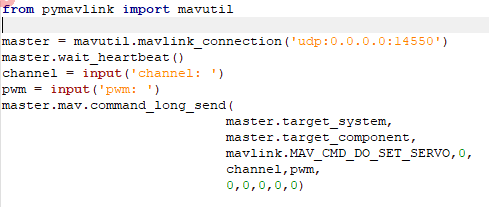
具体实现的代码如下
哦哦,set_servo,这个不是电机通道!servo是伺服通道哇~
Set_MODE 试试!
set_mode是对应的工作模式,‘MANUAL’,‘depthhold’之类
谢谢。请问如何实现对单个通道的电机实现控制呢,有相关命令吗?还是要重新编译ArduSub呢?
非要通过Pixhawk么,都已经控制单电机了,那就是把Pixhawk当pwm波发生器了。
因为后期想用BlueRov实现一些控制算法,需要对单个推进器进行控制,希望8个推进器能独立工作。能不能在不修改底层的情况下通过MAVLink发送命令实现呢?
因为RC_CHANNEL对应的不是电机,而是6种运动方式,所以不知道如何修改值改变单个电机的PWM
我跟代码作者聊了一下,现在实现起来应该是 sad 与 not possible~
谢谢~,我修改底层Ardusub看看吧,添加一种工作方式
您好,请问如何获取源码?
你好,参考如下链接
谢谢,我该如何控制一个直流有刷电机?电调与飞控的连接和舵机与飞控的连接相同吗?
本质是Pixhawk给出的PWM波改变脉宽实现的,所以符合这个条件的电调都可以。
1 个赞
您好,能否帮我问问代码作者,如果想实现对8推进器的独立控制,应该修改ArduSub代码哪部分吗?
你好,跟作者沟通过,目前无法实现
1 个赞
好的,谢谢