对BlueROV2 框架进行了适当优化:
1、边缘钝角处理,更加舒适
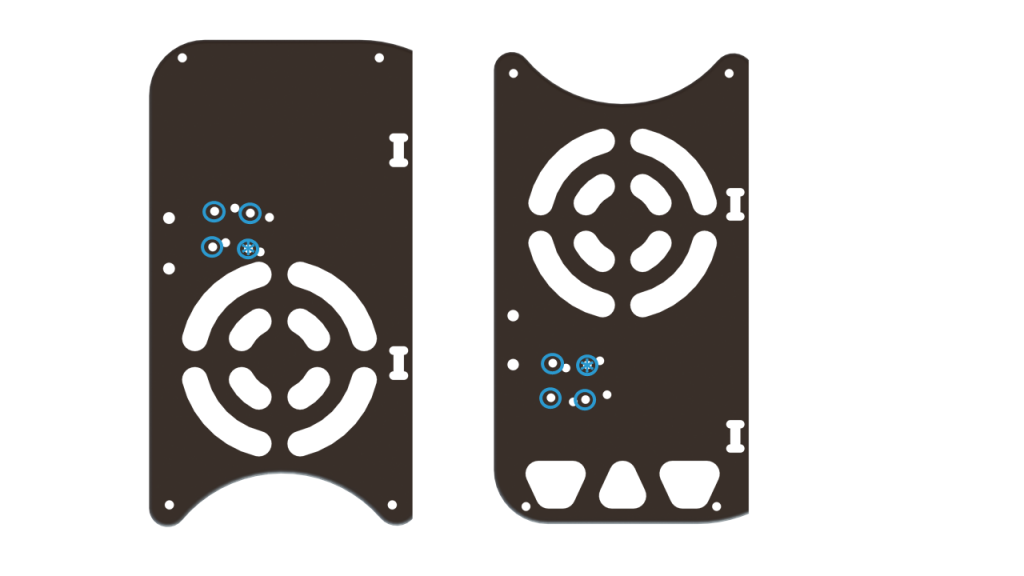
2、增强了前后方向的动力,抗流能力更强,向前推力增加了22%,但是侧向推力减小了22%
这样更加实用一些,毕竟抗流能力才是主要的~
他这样是不是就是把推进器的角度变小了呀,在海里面抗流还是最重要的。