
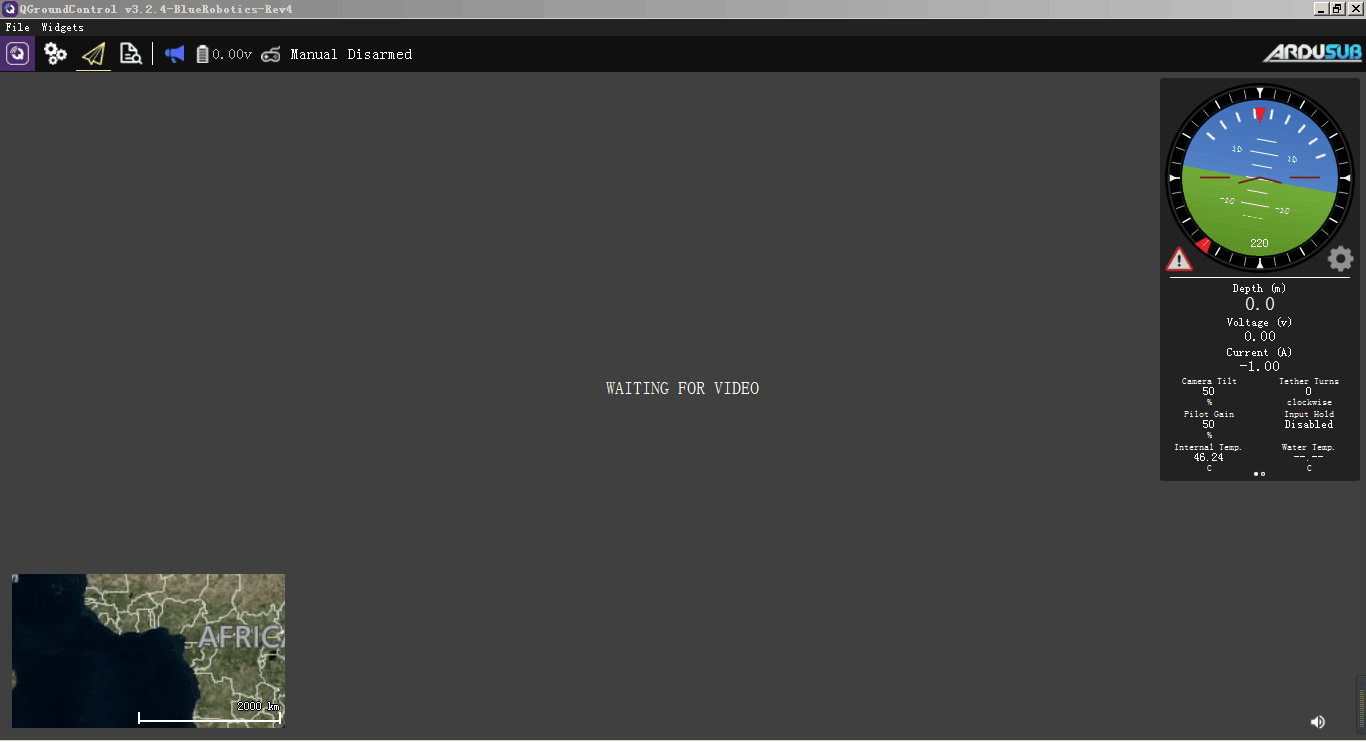
水下机器人控制器通过电力载波和QGC进行通讯的时候,只有在刚上电的一两秒时候QGC才能显示摄像头的画面,然后就会断开显示图示的画面,并且手柄配置好相应的通道控制摄像头的舵机进行上下角度,但是舵机也是没有反应的,特来发帖,望广大吧友指点迷津。
舵机没有反应就说明问题了,电流不够。用两个UBEC,一个给树莓派供电,一个给PIXhawk和舵机供电,试试。
或者先不接上pixhawk,在QGC上看看能否看到画面。
分开供电试过了,但是还是这样子
方便提供实物照片么,接线部分
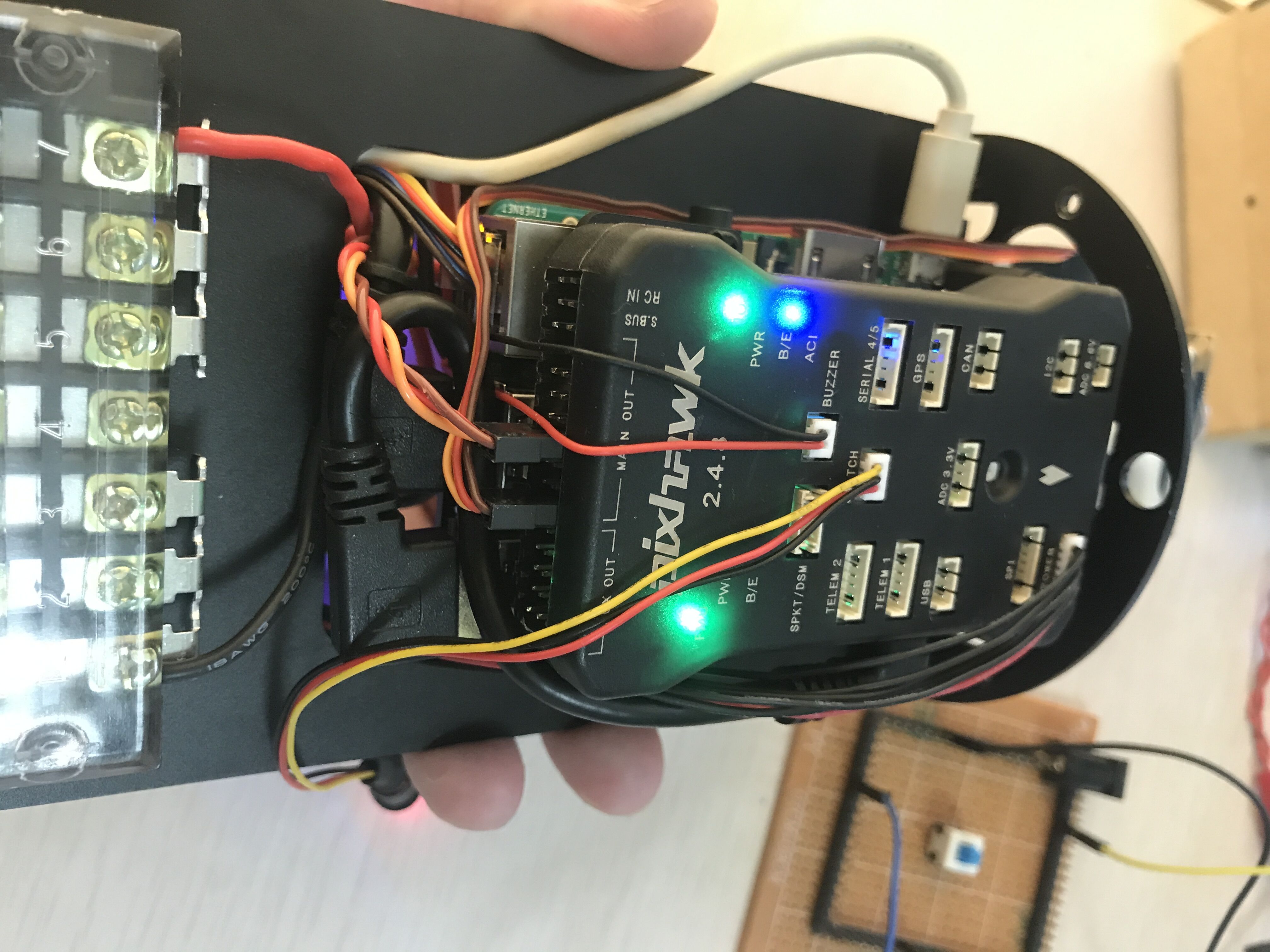
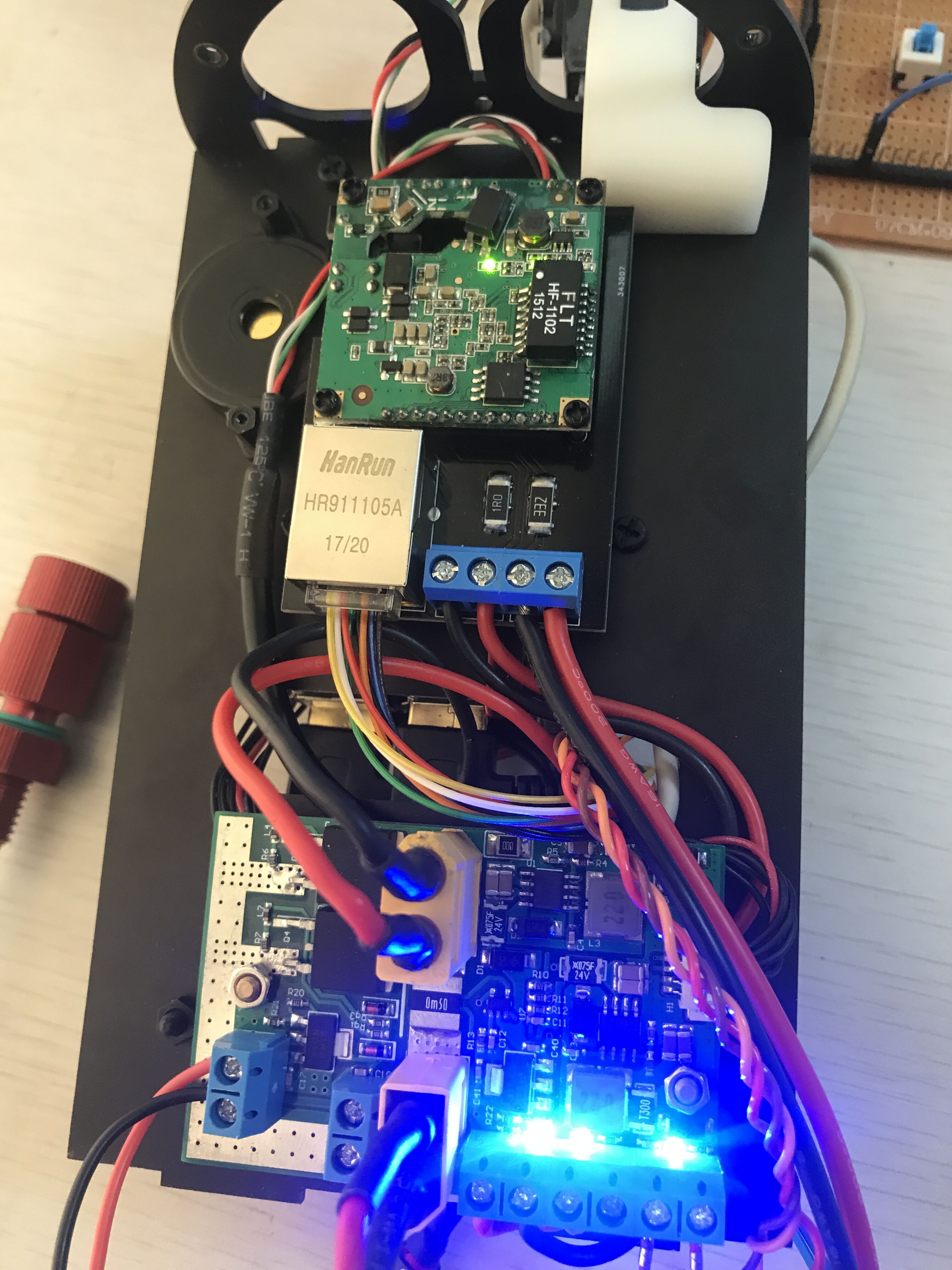
24V输入,蓝色的三个灯分别是12V,5V,5V,一路给树莓派供电,一路给输入到pix的通道,舵机从pix通道取电,
那就这样先不连接PIXHAWK,只连接树莓派。QGC显示没连接,但是可以看的到画面。
也是上电的瞬间有画面,几秒之后就没有
看着不像是blue的,最好哪里买的找哪里问,这样有针对性一点。
年轻的时候的我,在某maker上买的漏了6次水,不吹不黑,绝望到现在 %。%%%%
我也是某make上买的,现在买回来出问题了没人理,大发一句看手册就完事了,就是现在的情况
现在舵机可以调了,但是还是没有画面
你好,请问这个问题后来怎么结局的,谢谢