
读研期间研究课题为水下机器人,故自己从零研发一台水下有缆机器人。
2 个赞
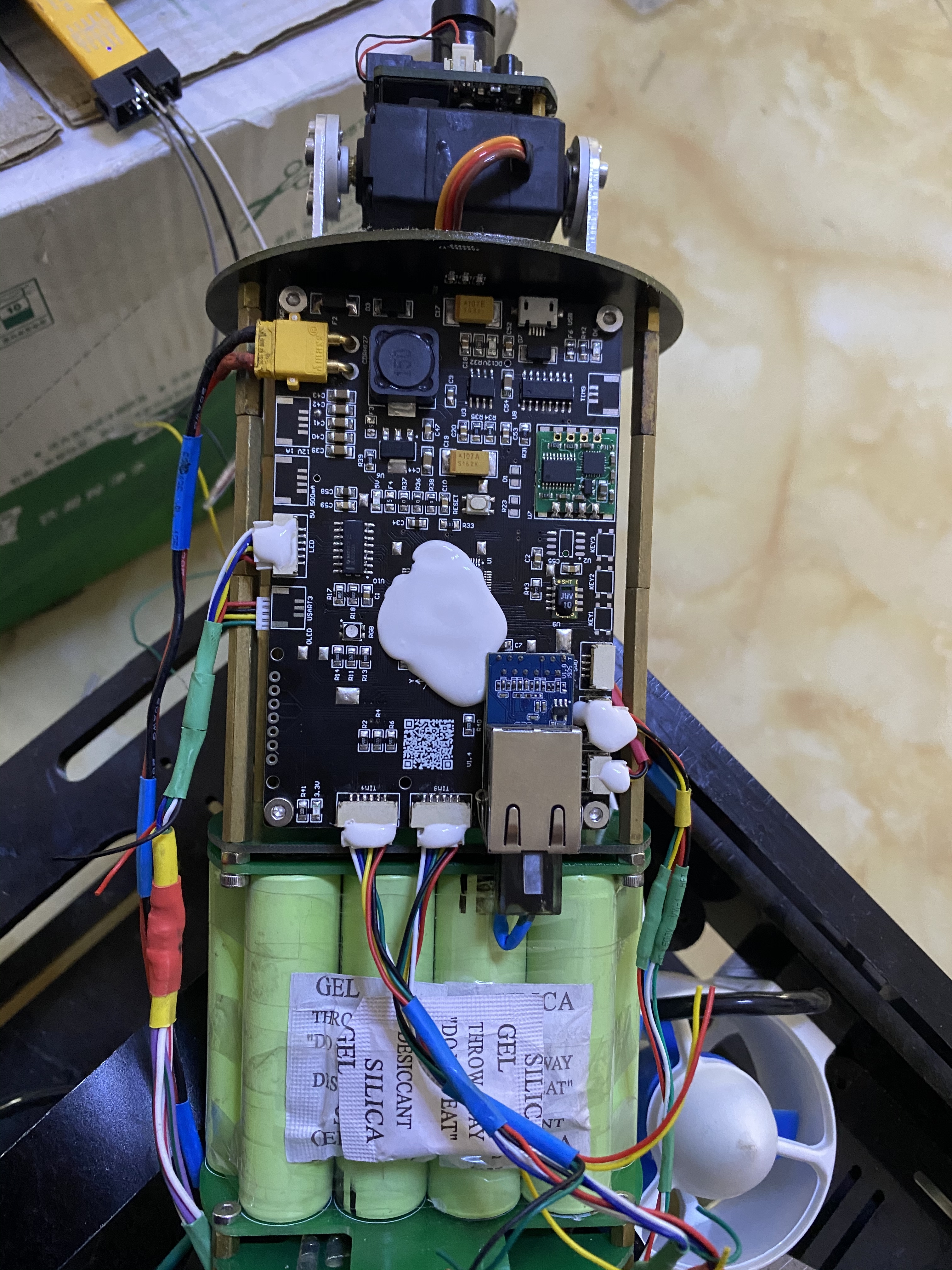
水下主控板,采用STM32F407,预留11路PWM,一路IIC,1路SPI,2路AD,一路USART,板带一路电压检测,EEPROM等,2路LED驱动,可以实现亮度调节,最大功率每个6W,SOCKET通信协议

3 个赞


目前正在设计框体,调试程序
Cool!
PID算法什么的都自己写吗?
1 个赞
期待后续作品
请问视频是如何传输的?
网络通信
期待后续过程
这个都是基于市面上比较常见的开源模块的,例如Pixhawk和树莓派3,网上硬件资料很多。



你好,请问这个界面是自己做的呢还是QGC修改的呢
自己做的